


Kami menguji semua penyedot debu pada lantai kayu keras dan karpet.
Bagaimana kami menguji robot penyedot debu
Metode kami untuk mengevaluasi robot penyedot debu sederhana, namun melelahkan. Ada dua jenis pengujian yang kami jalankan. Uji coba pertama adalah untuk mengetahui seberapa baik robot menutupi lantai saat sedang dibersihkan. Kami membangun ruang pengujian berstandar industri seperti yang ditentukan oleh Komisi Elektroteknik Internasional hanya untuk tujuan ini. IEC adalah badan standar internasional yang bertanggung jawab untuk mengelola prosedur pengujian robot vakum, antara lain, untuk produsen vakum.

Mari kita sambut ruang uji robot penyedot debu kami. Di dalamnya terdapat objek yang mungkin terlihat sedikit aneh. Objek-objek tersebut dirancang untuk meniru perabotan dan rintangan yang akan dihadapi robot di dunia nyata.
Di dalam ruangan ini terdapat objek yang dirancang untuk meniru rintangan umum yang ditemui robot penyedot debu untuk navigasi saat membersihkan. Rintangan ini meliputi tepi dinding, kaki meja dan kursi, sofa dan perabotan lainnya, dan sebagainya, ditambah lantai keramik dan lantai kayu keras, serta karpet. Kami memasang lampu LED di bagian atas setiap penyedot debu. Dimensi lampu sesuai dengan lebar nosel yang diukur dari setiap robot penyedot debu yang kami uji.
Saat robot bergerak di dalam ruangan sambil membersihkan, kamera di atas kepala menangkap gambar pencahayaan panjang dari seluruh ruangan dalam cahaya redup. Foto itu kemudian akan memiliki jejak cahaya, yang dibuat oleh LED, yang menunjukkan area yang tepat tempat robot bergerak (dan posisi noselnya) selama waktu operasinya. Kita juga dapat melihat area lantai tempat penyedot debu mungkin terlewat atau tersangkut. Anda dapat melihat hasil navigasi semua penyedot debu robot dalam kelompok pengujian kami di galeri di bawah ini.
Jenis pengujian kedua mengungkap seberapa banyak kotoran fisik yang dapat disedot oleh penyedot debu dari lantai. Untuk meniru kotoran dengan ukuran partikel kecil, kami menggunakan campuran pasir bermain dan pasir lanskap. Untuk tanah dengan partikel yang lebih besar, kami menggunakan butiran beras hitam mentah. Robot kemudian berjalan dalam mode garis lurus melintasi tiga jenis lantai (karpet tumpukan rendah, karpet tumpukan sedang, dan lantai kayu keras polos).

Lebih lanjut tentang pengaturan pengujian robot vakum kami.
Kami juga mengontrol lebar nosel khusus untuk setiap penyedot debu. Kami membuat alat yang dapat disesuaikan untuk mengotori lantai pengujian kami. Alat ini memungkinkan kami meletakkan sebidang tanah dengan area yang tepat agar sesuai dengan dimensi nosel untuk setiap robot. Massa tanah juga tidak dipilih secara acak. Kami mengukur jumlah proporsional yang terkait dengan bahan lantai, jenis puing, ditambah lebar nosel setiap penyedot debu.
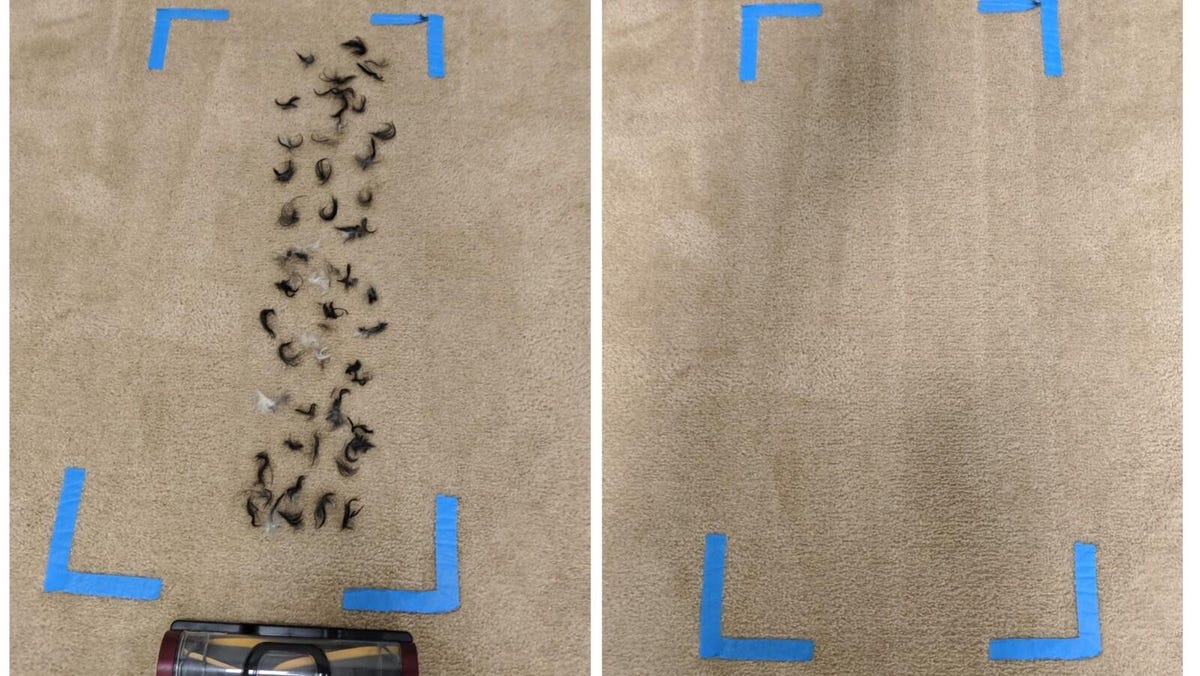
Kami melakukan tiga kali pembersihan (minimal) pada setiap jenis lantai. Kami juga melakukan uji pembersihan dengan pasir dan beras secara terpisah. Itu berarti setidaknya ada 18 pengujian per robot penyedot debu. Kami menimbang tempat sampah robot sebelum dan sesudah setiap pembersihan. Dari sana kami dapat menghitung persentase serpihan yang terkumpul untuk setiap pembersihan dan jumlah rata-rata tanah yang berhasil dibersihkan oleh mesin. Selain itu kami melakukan pengujian anekdot (visual) bulu hewan peliharaan pengujian untuk setiap robot, di ketiga jenis lantai.
Uji partikel berukuran sedang berbasis beras kami tidak menunjukkan perbedaan yang cukup antara setiap pembersih, yang berarti semuanya dapat menangani partikel yang lebih besar tanpa masalah. Untuk penghilangan bulu bagi pemilik hewan peliharaan, kami menilai berdasarkan pengalaman pribadi.
Bagaimana kami menguji penyedot debu tanpa kabel
Kami menjalankan pengujian secara langsung pada ketiga jenis lantai.
Menguji penyedot debu tanpa kabel tidaklah serumit menguji robot penyedot debu pembersih, tetapi masih butuh banyak waktu dan upaya cermat untuk menemukan penyedot debu nirkabel terbaik. Kami menjalankan setiap penyedot debu dalam garis lurus pada tiga permukaan berbeda (kayu keras, karpet bulu rendah, karpet bulu sedang). Pada ketiga alas uji, area uji memiliki panjang yang sama (30,25 inci).

Kami menguji kemampuan penyedot debu untuk membersihkan pasir dan beras.
Sama seperti dalam pengujian robot, lebar tempat pengujian sebanding dengan lebar nosel penyedot debu. Kami mengukur sendiri lebar ini. Kami juga menggunakan lebar nosel, ditambah jenis lantai, untuk menghitung kepadatan tanah untuk setiap pengujian, sesuai pedoman IEC. Kami juga menggunakan jenis tanah yang sama di sini; pasir, beras, dan bulu hewan peliharaan. Kami melakukan tiga kali pengujian (minimal) pada setiap jenis lantai. Kami juga menguji daya hisap dengan pasir dan beras secara terpisah. Itu berarti setidaknya ada 18 pengujian per penyedot debu. Kami menimbang tempat sampah penyedot debu sebelum dan sesudah setiap pengujian.
Dari sana, kami dapat menghitung persentase kotoran dan serpihan yang terkumpul setiap kali digunakan dan jumlah rata-rata tanah yang berhasil dibersihkan oleh penyedot debu. Selain itu, kami juga melakukan uji bulu hewan peliharaan secara anekdot (visual) untuk setiap penyedot debu, di ketiga jenis lantai untuk membantu kami memilih penyedot debu nirkabel terbaik.
Mohon maaf, Foto memang tidak relevan. Jika keberatan atau harus diedit baik Artikel maupun foto Silahkan Klik Laporkan. Terima Kasih





